基于WGS-84坐标系的坐标转换解决方案
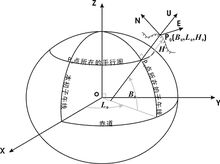
千寻的FindMM和FindCM数据是基于 WGS-84坐标系,其几何意义是:坐标系的原点位于地球质心,z轴指向(国际时间局)BIH1984.0定义的协议地球极(CTP)方向,x轴指向BIH1984.0的零度子午面和CTP赤道的交点,y轴通过右手规则确定。该数据对监测业务处理难度很大,目前大部分形变监测产品都是将该数据转换成站心直角坐标系进行业务处理,站心直角坐标系(ENU),其几何意义是:以监测点(通常卫星接收天线)为坐标原点,向上为正(天向),y与椭球短半轴重合(北向),x轴与地球椭球的长半轴重合(东向)所构成的直角坐标系,称为当地东北天坐标系(ENU),如下图:
但在实际的监测业务需求中我们发现,很多的监测物体(楼房、桥梁、大坝、边坡)并不是正南、正北的规则几何体,所以简单采用站心直角坐标系,也会造成很大的监测误差。根据监测物的监测需求建立合适的监测坐标,提高监测精度,如下图:

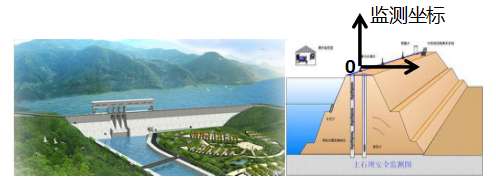
山体滑坡监测应按滑坡的方向和竖向的高程建立监测坐标,大坝按水流方向建立监测坐标。
2、算法原理我们以桥梁监测为例进行说明,如下图:
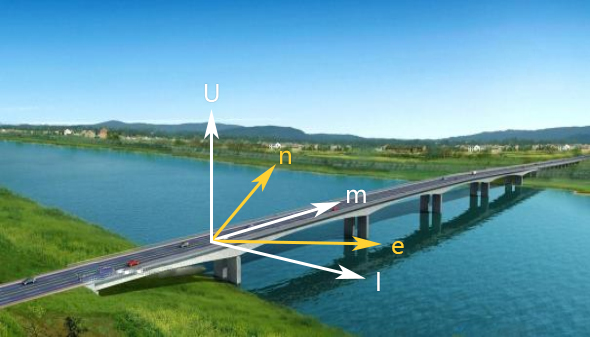
站心坐标enu用黄色标出,实际观测坐标应该按河流的方向建立,如白色的lmu坐标系,观测数值需要在两个坐标系进行转换,因为高程坐标轴u是重合的,所以坐标系转化就能简化如下图的二维坐标转换:
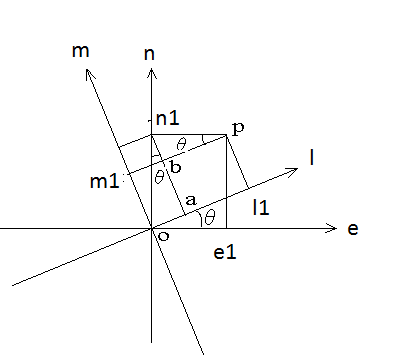
在原坐标系eon中, 绕原点沿逆时针方向旋转θ度(θ度可以在实施现场通过人工方式获得), 变成座标系 lom,设有某点p,在原坐标系中的坐标为 (e1,n1), 旋转后的新坐标为(l1, m1)。
l1=oa+al1;
m1=an1-bn1;
其中:
oa=n1*sin(θ) , al1=e1*cos(θ)
an1=n1*cos(θ), bn1= e1*sin(θ)
综上
l1 = oa + al1 = n1*sin(θ)+e1*cos(θ)
m1 = an1-bn1 = n1*cos(θ)-e1*sin(θ)
2、实施过程通达TDMM系统监测结果默认是站心坐标,所以在系统实施过程,只需要现场通过人工方式获得实际观测坐标和站心坐标的旋转角度θ,并将θ角度配置到系统中,系统就可以自动将监测数值进行转换。